Su altı akustiği ve tarihi
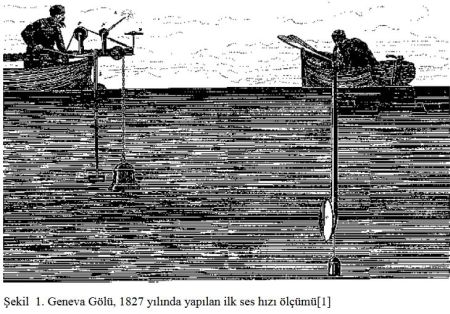
Su altı ortamında sesin, görünür ışık veya elektromanyetik enerjiye göre daha uzağa gidebildiği önceden beri bilinmekteydi. Su altı akustiğiyle ilgili ilk ölçümler 1827 yılında İsviçreli fizikçi Daniel Colloden ve Fransız matematikçi Charles Sturm’un, su altında ses hızını ölçmek amacıyla, İsviçre’de Geneva Gölü’nde bu iki isim tarafından yapılmıştır (Şekil 1) [1]. Bir ışık ve su altı çanı arasındaki zaman aralığını kabaca ölçerek yapılan bu deneme, günümüzün kabul edilen değerlerine oldukça yakındı.
1900’lü yıllarda ise, fener gemileri, bir su altı çanı ve güvertede bulunan bir sis düdüğünün birleşiminden oluşan bir uzaklık ölçme sistemi kullanılmaktaydı. Bu sistem sayesinde yaklaşan gemilerdeki mürettebat iki sesi de duyabiliyordu. Su altından gelen ses, gemi gövdesine monte edilen bir hidrofona ulaşıyordu ve iki sesin farkını ölçerek fener gemisine olan tahmini uzaklıklarını ölçebilmekteydiler.
İlk sonar sistemleri, Birinci Dünya Savaşı sırasında Amerikan, İngiliz ve Fransızlar tarafından denizaltıları ve buz dağlarını bulmak amacıyla geliştirildi. O zamanlarda sonarlara “ASDIC” (AntiSubmarine Detection Investigation Committee) adı veriliyordu. İkinci Dünya Savaşı esnasında ise su altı akustiği hızlı bir gelişme gösterdi ve bu dönemde düşman denizaltılarının su yüzeyindeki gemiler tarafından tespit edilmesi oldukça kolay bir hale geldi. Çünkü çok daha güçlü ve daha iyi oluşturulmuş ses işaretlerini suya gönderebilmekteydiler. Sinyal, denizaltının gövdesinden yansıyarak geri gelmekte ve uzaklığı hakkında bilgi vermekteydi.
Günümüzde; derinlik ölçme, deniz tabanının morfolojisinin çıkartılması, sismik stratigrafi, petrol ve doğal gaz araştırmaları, kabuk özellikleri ve kalınlığının belirlenmesi, mühendislik ve akustik uygulamalar, balık stoklarının bulunması gibi birçok çalışmada akustik yöntemler kullanılmaktadır.
a) Sesin özellikleri ve tanımlar
Ses, esnek bir ortamın moleküllerinin düzenli hareketinden oluşur. Malzeme elastik olduğu için, malzeme parçacıklarının hareketi; hareket bir ses kaynağından çıktıktan sonra komşu parçacıklarla bağlantı kurmasıyla meydana gelir. Bir ses dalgası bu sebeple kaynaktan dışa doğru ses hızına eşdeğer bir hızla yayılım yapar ve bu yayılımın gerçekleşebilmesi için mutlaka katı, sıvı veya gaz gibi bir ortamın olması şarttır. Sıvı içerisinde parçacık hareketi yayılma doğrultusuna paralel ve ileri geri şekilde olur. Bu yüzden ses dalgaları boyuna dalgalardır.[2]

Boyuna dalgalar ise enine dalgalarda olduğu gibi zaman veya uzaklığa göre basınç değişimi çizilerek somutlaştırılabilir ve bu şekilde oluşan sinüs dalgasındaki tepeler sıkışma fazını, çukurlar ise seyrelme fazını gösterir. Art arda gelen iki dalganın peak noktaları yanı tepe kısımları (veya minimum noktaları /çukurları) arasında kalan uzaklık “dalga boyu” olarak tanımalanır ve simgesel olarak ‘’X’’ ile gösterilir. Sıkışma ve seyrelmeden meydana gelen tam bir dalga hareketi bir “devir” olarak adlandırılır. Dalga generatörünün birim zaman süresince ürettiği dalgaların sayısına ise “dalganın frekansı” adı verilir. Frekans 1/s veya Hz olarak ifade edilir ve f ile gösterilir. Ses dalgasının ortalama basınç seviyesinden yaptığı sapma “genlik” olarak ifade edilir ve sesin
yüksekliğinin ölçütüdür. Bir ses dalgasının dalga boyu (1) denklemindeki gibi, sesin frekansı ve yayılma hızı (c) cinsinden ifade edilebilir[2].
b) Önemi
Altmış yılın üstünde bir süredir okyanus araştırma çalışmaları düzenli bir şekilde artış göstermektedir. Bu çalışmalarda su altındaki alıcıların topladığı bilgilerin sağlıklı bir şekilde suyun yüzeyine iletilmesi gerekmektedir. Bu noktada, bilgilerin uydular aracılığıyla bilgi toplama merkezine gönderilmesi mümkündür.
Akustik dalgalarda suyun yüzlerce kilometre altında sinyal üretmek mümkündür. Su altı akustik kanal, sinyalin yüzeyden ve deniz dibinden yansımadan dolayı çok yollu bir kanal gibi karakterize edilir.
Çünkü dalga hareketleri, sinyal parçalarının farklı yayılma ve aynı zamanda gecikmelere sahip olmalarına, bunun sonucunda da sinyal kayıplarına yol açar.
Son yıllarda sualtı akustik iletişimi mühendislik ve araştırma alanı olarak hızla büyümektedir. Sualtı akustik iletişim teknolojileri,
- Deniz-aşırı petrol sanayisinde uzaktan kontrol, çevresel sistemlerde kirlilik gözlemleme, okyanus-altı istasyonlarda kaydedilen bilimsel verilerin toplanması
- İnsansız sualtı araçları
- Dalgıçlar arasındaki konuşma iletişimi
- Cisim algılama-kurtarma için okyanus tabanının haritasının çıkarılması gibi uygulamalar için büyük bir önem arz etmektedir.
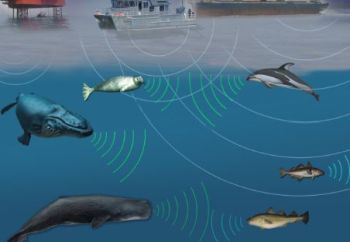
Akustik ortam gürültüsü karidesler, balıklar, gemiler ve çeşitli memeliler tarafından meydana gelir. Liman yakınlarında ortam gürültüsüne ek olarak insan kaynaklı gürültüler de eklenir. Tüm bu bozucu etkilere karşın sayısal sinyallerin iletilmesi için verimli ve yüksek doğruluklu su altı akustik haberleşme sistemlerinin tasarlanması mümkündür.
Işık ve radyo dalgaları su içinde yayılım yaparken, çok çabuk zayıflarlar ve sönümlemeye uğrarlar, fakat ses dalgaları yayılımı için su ideal bir ortamdır. Deniz bilimciler, bir düşman denizaltısının konumunu saptamak için ilk hidroforun denize indirilmesinden bu yana geçen süre içersinde, su altı akustiği konusunda sürekli araştırmalar ve uygulamalar yapmaktadırlar. Bu süreç sonucunda dalgaların su içindeki yayılışı günümüz deniz bilim çalışmalarında yararlanılan en önemli araçlardan biri halini almıştır.
Sonar Nedir?
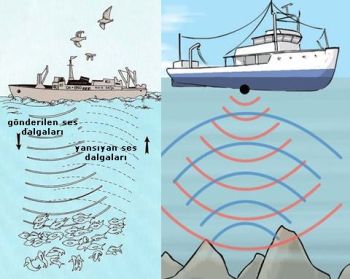
Sonar; transdüser (alıcı ve verici özellikte) sensör grubu, sürücü elektronik birimler ve çeşitli kullanıcı ara yüzlerinden oluşan bir elektromekanik aygıttır. Basitçe, sürücü elektronik birimlerden transdüser’e iletilen elektriksel vuruş (impulse) yine transdüser marifetiyle ses dalgasına dönüştürülür. Bu aşamada elektrik enerjisi bir çeşit mekanik enerji olan akustik enerjiye dönüşür. Oluşan ses dalgası suya iletilir. Bu ses dalgası su altında bulunan herhangi bir cisme çarptığında bir kısım dalga bu cisim üzerinden kaynağa geri yansır. Kaynağa yansıyan bu enerji transdüser vasıtasıyla tekrar elektriksel sinyale dönüştürülür. Bu sinyal, sürücü elektronik birimlerin bir parçası olan amplifikatör yardımıyla yükseltilerek kullanıcı ara yüzüne iletilir. Bu sayede kullanıcı su altında bulunan cisim ve bu cismin platforma göre konumu hakkında bilgi edinir. Modern sonarlar akustik enerjiyi su altında bulunan mayın vb. tehditlerle diğer cisimlerin belirlenmesi, sınıflandırılması, sualtı topografisinin çıkarılması, seyir ve sualtı iletişiminin sağlaması maksatlarıyla kullanılırlar.
Sonar-Dom Sistemi
Sonar dom sistemleri, genel kullanım olarak deniz platformlarının üst kısımlarına monte edilen bir tarsımdır. Bağlı bulunduğu ya da monte edildiği noktadan su yüzeyinin alt noktalarında mevcut olan genel olarak hassasiyeti yüksek ve narin bir yapısı bulunan sonar sensör gruplarını bulunduğu ortamdan genellikle deniz ortamından kaynaklanan her türlü koşulda oluşan tüm mekanik darbelere (deniz hareketleri, doğal koşullar ve canlı etkilerine bağlı sualtında ki cisimlerle çarpma etkisinin oluşumu, platformun aşınması, vb. durumlarda meydana gelen ağır mekanik etkiler), denizin tuzlu suyundan kaynaklı korozif etkilerine ve birçok kullanım durumunda karşılaşılan sonar platformunun kendiliğinden ve su altındaki hareketinden kaynaklı istenmeyen su altı ortam gürültülerine karşı koruyucu dayanıklılıkta, genel olarak çoğu kullanımlarda hidrodinamik geometri ve akustik dalgaların geçirgenliğine sahip bir su altı yapısıdır. Sonar sensör grupları ile birlikte sonar dom ikisi sonar sistemlerin sensör denilen kısmını oluştururlar.
Sonar Domu Tasarımı
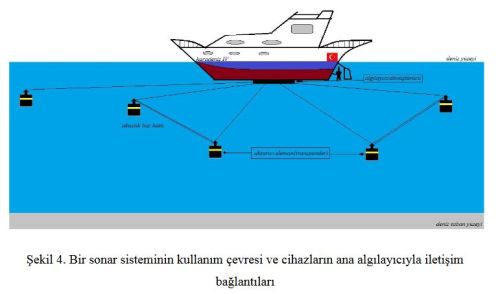
Sonar domun tasarımı, sonar akustik performansı ve mekanik mukavemet arasındaki bir optimizasyon problemidir. Bu problemin ana parametreleri; sonarın çalışma frekansı, çıkış gücü, uygulamaya özgü mukavemet isterleri, dom geometrisi, sonar sensör gruplarının yapısı ve dom içindeki yerleşimleri, dış kaynaklı gürültüler (platform, platformun su içindeki hareketi, ortam gürültüsü kaynaklı vb.), dom içinde istenmeyen akustik yansımalar, malzeme seçimi, mukavim yapının tasarımı ve üretim teknolojisi gibi çok çeşitli, çok yönlü ve bağlantılı unsurlardır. Bu parametrelerin çokluğu ve karmaşık ilişkileri özellikle yüksek çalışma frekanslarına sahip sonar uygulamalarında (mayın avlama sonar sistemlerinde olduğu gibi) kullanılan sonar domların tasarım ve üretiminde büyük teknik ve mühendislik güçlükleri beraberinde getirmektedir(şekil 4). Bu sebeple sonar domu tasarımı ve üretimi çok yönlü bilgi birikimi ve tecrübe gerektirmektedir.
Sualtı Kablosuz Sensör Ağları
Son dönemde gerek bilimsel ve askeri, gerekse ticari açıdan denizleri ve okyanusları gözlemleme konusu artan bir ilgi görmektedir. Bu tarz gözlemler açısından uygunluğu en yüksek araç dağıtılmış su altı kablosuz sensör sistemleridir denilebilir. Bu sistemler bütününe ise Su altı Kablosuz Sensör Ağları adı verilir[4,5].
Deniz & Okyanus dibine yerleştirilen sensörler, sismik hareketleri gözlemleme, deniz suyu kirliliğini ölçme, sualtı madenlerini araştırma, sualtı ve su üstündeki cihaz ve araçları izleme gibi uygulamalarda kullanılmaktadır. Bu uygulamaları olanaklı kılmak için cihazların temel olarak su altı ortamında haberleşmeleri gereklidir. Dağıtılmış ve ölçülendirilebilinen kablosuz sensör ağlarının su altına 2D ya da 3D (iki yada 3 boyutlu) şekilde kurulması ile her bir sensörün yerel olarak bulunduğu su altı ortamında ki çevresel olayları algılayıp gözlemlemesi mümkün hale gelmektedir. Bu koşullar altında genel olarak sensörler mevcut bir platforma sabitlenerek su altına ortamına konumlandırılırlar.
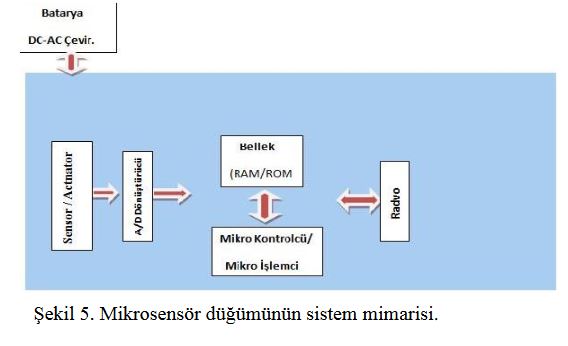
Fakat okyanus ortamı değişken ve hareketli bir ortamdır. Dolayısıyla hareketli ve dinamik bir gözlem sisteminin kullanımı daha uygun olacaktır. Hareketli sensörlerden oluşmuş kendi kendine organize olabilen bir su altı ağı, izleme, zamanlama, algılama, gözlemleme, su altı kontrolü ve hataya dayanıklılık gibi uygulama durumları için çok daha iyi bir destek sağlamaktadır denilebilir. Şekil 5 de bir mikro sensör mimarısi verilmiştir.
Örnek SUALTI AKUSTİK TESPİT SİSTEMİ
ASELSAN Sualtı Akustik Tespit Sistemi stratejik öneme sahip limanları farklı tip sonarlar kullanarak düşman tehditlerine karşı korumak üzere tasarlanmıştır.
Konfigürasyon Dalgıç Tespit Sonarı (DTS):
• ASELSAN DTS yüksek çözünürlükle çalışan yüksek frekanslı sonardır.
Aktif Sonar:
• Uzak mesafeden aktif tespit amacıyla kullanılan düşük frekanslı sonardır.
Pasif Sonar:
• Uzak mesafeden pasif tespit amacıyla kullanılan sonardır.Sualtı Kabloları:
• Dalgıç Tespit Sonarlarının şelter birimi ile olan bağlantısı Sualtı Kabloları ile sağlanır. Sualtı Kabloları ile hem veri hem de güç iletimi sağlanmaktadır.
Şelter:
• Sinyal İşleme Kabineti, Operatör Konsolu, veri haberleşmesi için fiberoptik ethernet kartları ve sonarlara güç sağlayacak birimlerin yerleştirildiği korunaklı yapıdır.
Sinyal İşleme Kabineti:
• Sonarlardan alınan veriler, sinyal işleme kabinetinde işlenerek operatör konsolunda sergilenir.
Operator Konsolu:
• Operatörler için konsol üzerinden iz ve hedefler ile ilgili bilgi alma imkanı bulunmaktadır.
Genel Özellikler
• Tespit edilen hedef tipleri
• Açık/Kapalı Devre Dalgıç
• Yüzücü
• Yüzücü İntikal Aracı (SDV)
• RHIB
• Denizaltı
• Suüstü Gemileri
• Otomatik tespit
• Otomatik alarm
• Hedef İzleme
• Sınıflandırma
• Yüksek tespit performansı
• Değişen ortam ve hedef koşullarına uygun olarak ayarlanabilir kaynak seviyesi, pals uzunluğu ve pals tipi
• Yüksek çözünürlüklü hedef tespiti için LFM, HFM yayın imkanı
• Doppler hassassiyeti için CW yayın imkânı
• Yüksek doğrulukta ve çözünürlükte mesafe ve açı tespiti
• Düşük yanlış alarm oranı ve yüksek tespit olasılığı (Pd) yeteneği
• Kullanıcı dostu arayüz tasarımı
• Modüler tasarım ve açık mimari

 Önemli İcatlar - Sonar
Önemli İcatlar - Sonar